Kamera kalibrieren
Auge-Hand-Kalibrierung von Kameras in ivOS
Während der Auge-Hand-Kalibrierung wird die Transformation zwischen der Kamera (Auge) und dem Roboter (Hand) ermittelt. Diese Beziehung wird aus mehreren Paaren aus Kamerabild und Roboterpose ermittelt. Im folgenden wird beschrieben wie Sie in ivOS eine Auge-Hand-Kalibrierung durchführen, welche Vorbereitungen notwendig sind und was im Hintergrund passiert.
Vorbereitungen
Gute Beleuchtung sicherstellen
Kalibrierplatte platzieren => Quellbehälter (Palette / Palettenwagen) leer aber im Kalibrierbereich.

Im Roboter-Programm IVOS_CALIBRATION wird die Hand-Augen-Kalibrierung automatisiert durchgeführt. Dabei werden folgende Unteraufgaben erledigt:
Kalibrierplatte-Pose “CalibrPlatePick” PR4 anfahren (ggf. nach-teachen)
- Je nach Anwendung “CalibrPlatePrePick1” PR5 anfahren (ggf. nach-teachen)Kalibrierplatte ansaugen
Je nach Anwendung “CalibrPlatePrePick2” PR6 anfahren (ggf. nach-teachen)
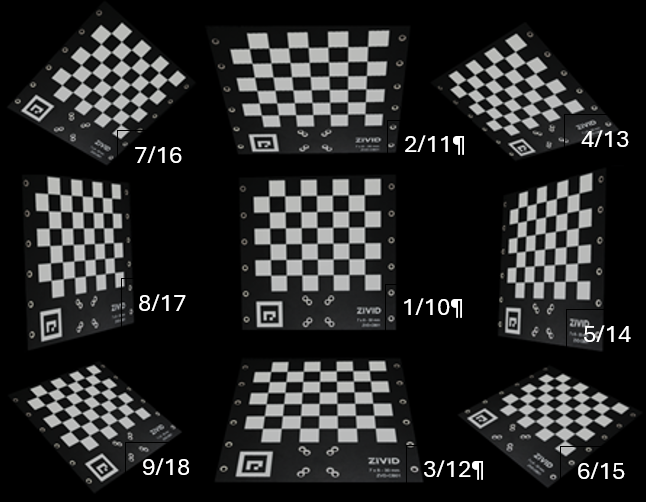
Kalibrierposen (18 Posen ggf. Nach-teachen) anfahren (Kamera 1 ab PR70, wenn vorhanden Kamera 2 ab PR50)
Wichtig: Kalibierposen mit TOOL 0 teachen.
Kalibrierposen definieren:
Teachen Sie für Kamera 1 ab Positions-Register PR70 Kalibrierposen und für Kamera 2 ab Position-Register PR50 (wenn vorhanden).
Die Posen und Bilder sollen den ganzen Arbeitsraum und eine Variation möglicher Gelenkwinkel abdecken. Die Neigung des Boards zur Kamera soll aber moderat (Nicht zu steil) bleiben.
Posen können nachfolgendem System angelegt werden:
18 Posen in 3x3 Muster angeordnet in zwei Höhen.9 Posen geringfügig über der Palette (5cm) und 9 Posen in größerem Abstand über der Palette (20-30cm).
Bei 9 Posen ist 1 die Mittlere Pose gerade
Bis zu 20° Neigung des Boards jeweils zum Zentrum der Palette bei Posen mit größerem Abstand.
Posen als Cartesian für Tool 0 in Register eintragen
Tipp: Teachen der Posen durch manuelles Verfahren, nicht mit geraden/eingegebenen Werten und auf Veränderung aller Gelenke zwischen den Posen achten.
Tipp: Kalibrierplatte nicht immer von der gleichen Richtung unter die Kamera halten (auch Joint 6 variieren)
Quelle: https://support.zivid.com/en/latest/academy/applications/hand-eye/hand-eye-calibration-process.html
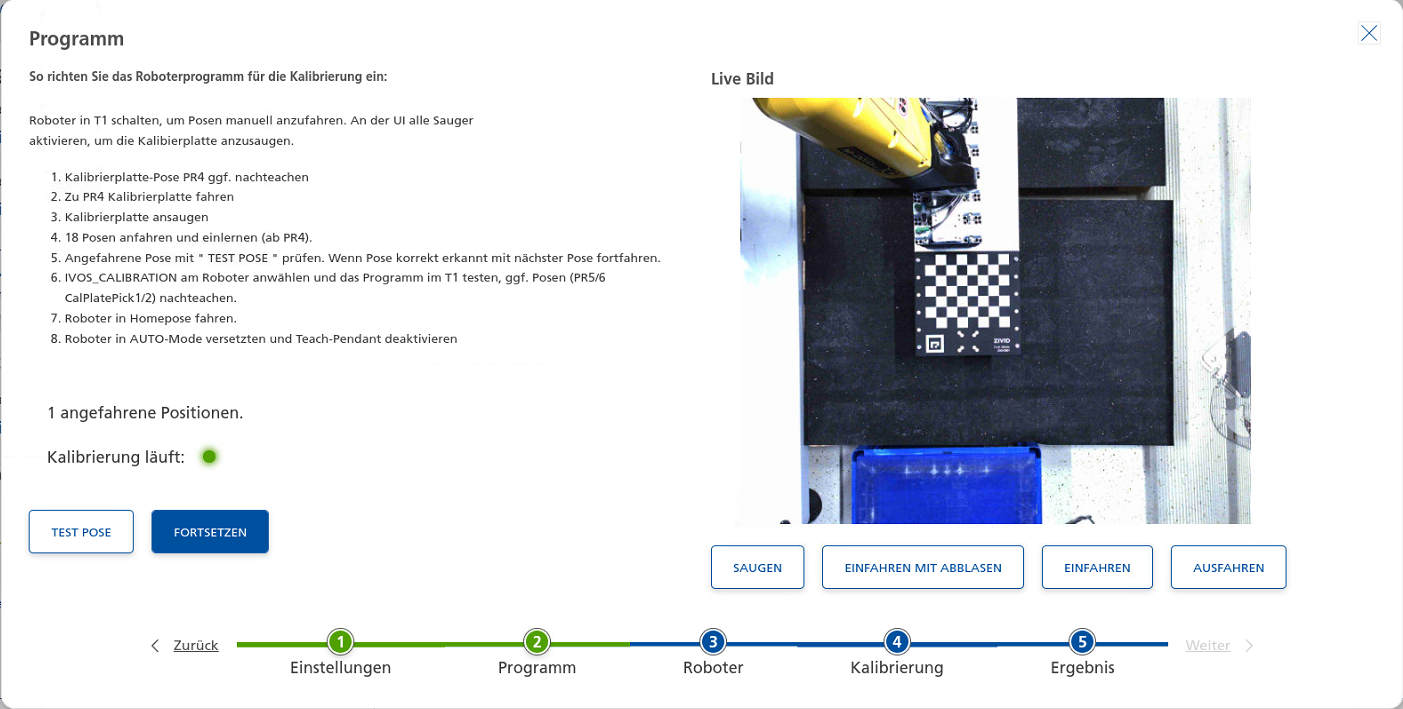
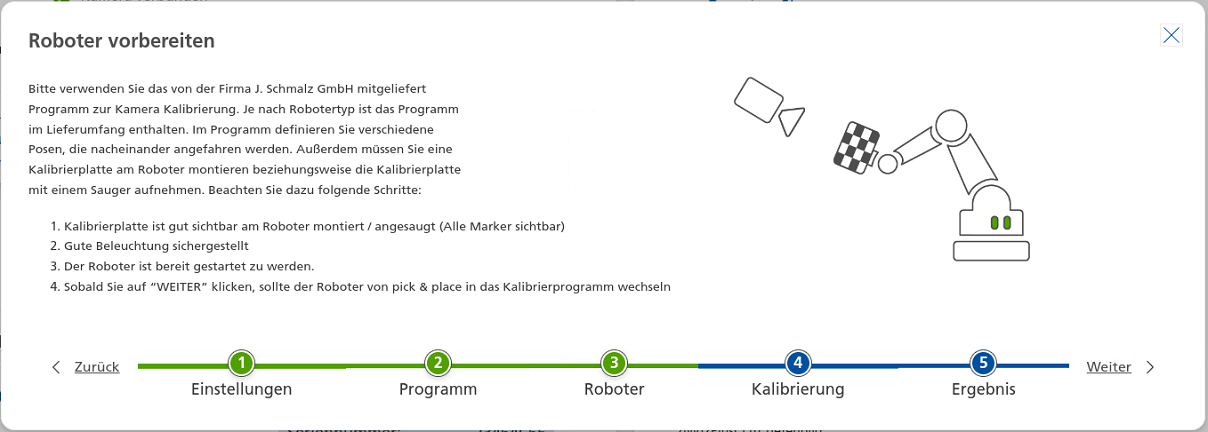
d. Achten Sie darauf, dass die Kalibrierplatte gut sichtbar im Blickfeld der Kamera ist. Der ARUCO-Marker muss sichtbar sein.

e. Im Wizard können Sie jede Pose vorab mit dem Button „Test
Pose“ überprüfen. Und die Pose/Beleuchtung nochmals
anpassen, sollte sie nicht gefunden werden.
f. Tipps von Zivid, falls das Ergebnis schlecht ist:
i. Kamera WarmUp beachten (machen wir Schmalz)
ii. „Infield Calibration“ in „Zivid-Studio“ durchführen
iii. Extra Kalibriersettings für Kamera verwenden
Anwendung
IVOS starten
Einloggen
Reiter
Kamera auswählen
Die zu kalibrierende Kamera auswählen!
Hier z.B. zivid2Plus110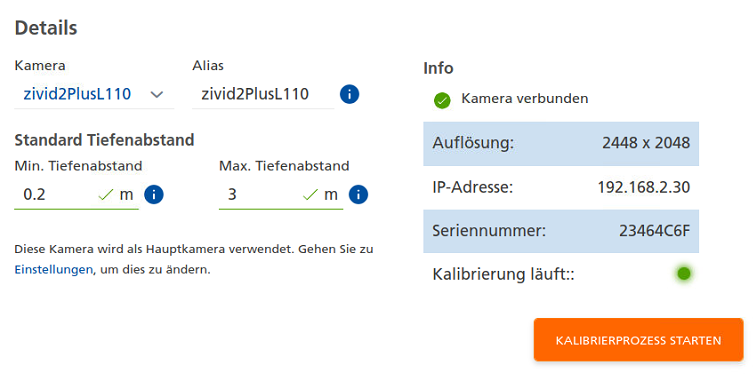
Starten der Kalibrierung:
Zum Starten der Kalibrierung ruft der Benutzer in der Kamera-View die Schaltfläche "Kalibrierprozess starten" auf.
Dadurch wechselt der Roboter den Programmmodus von Pick&Place zu ihrem Kalibrierprogramm.
Klicken Sie dann auf "Weiter" und folgen Sie dem Wizard.

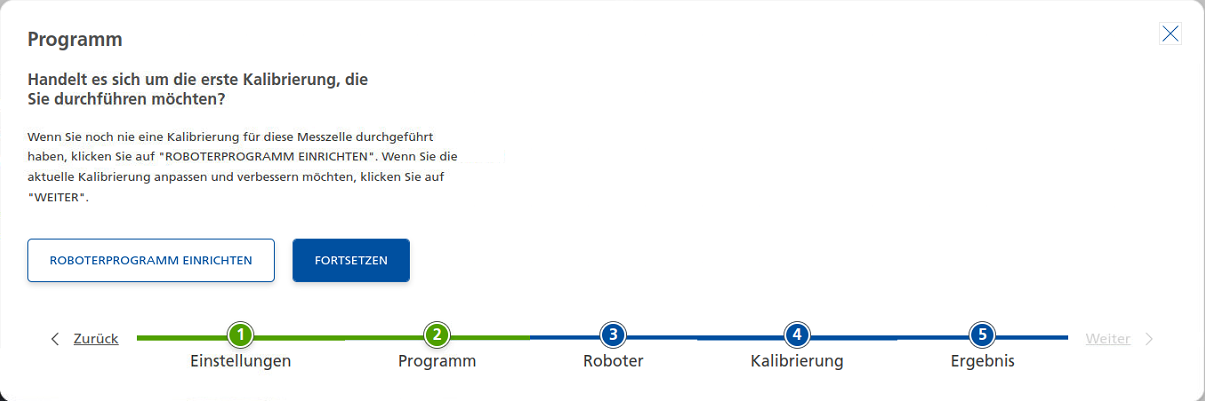
Wählen Sie die gewünschte Option
„Roboterprogramm einrichten“ es handelt sich um die Einrichtung der Erstkalibrierung. Es wurden bislang keine Posen geteacht.
„Fortsetzen“ optimieren einer bestehenden Kalibrierung.
Option: „Roboterprogramm einrichten“ Anleitung im Wizard folgen.
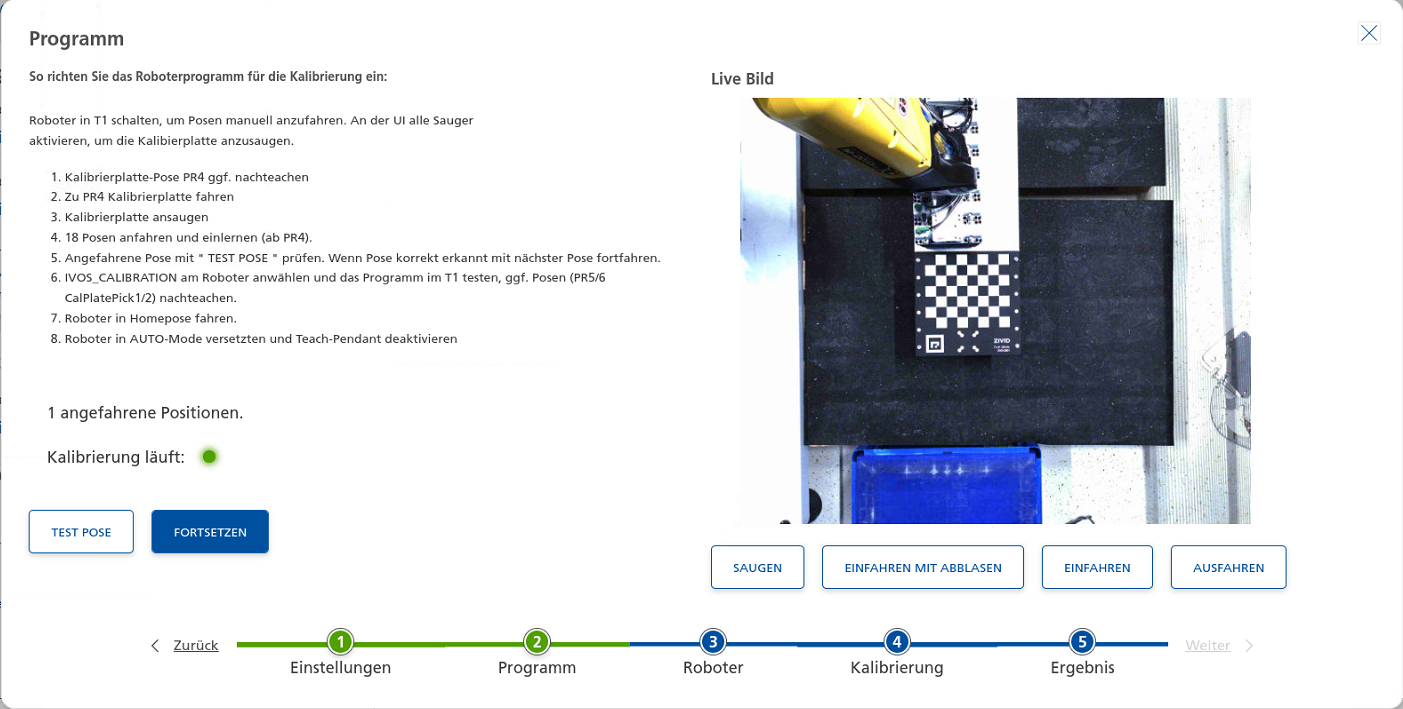
Über „Test Pose“ können die Kalibierposen vor dem teachen überprüft werden.
Über „Fortsetzen“ gelangen Sie zu eigentlichen Kalibiervorgang

Roboter in AUTO-Mode versetzten und Teach-Pendant deaktivieren. Ggf. den blinkenden Reset Hardware-Button drücken.
Klicken Sie auf “Weiter”, um den Kalibrieprozess zu starten.
Betätigen Sie nun den grünen START-Hardware-Button unterhalb des Bedienpanels. Dadurch wird der Roboter gestartet und fährt das Kalibrierprogramm ab.

Wenn alle Posen abgefahren sind, wird das Ergebnis der Kalibrierung berechnet und der Kalibrierfehler angezeigt. Der Kalibrierfehler sollte sich in der Größenordnung von <2mm bewegen. Wenn Sie mit der Kalibrierung zufrieden sind, klicken Sie auf Speichern.
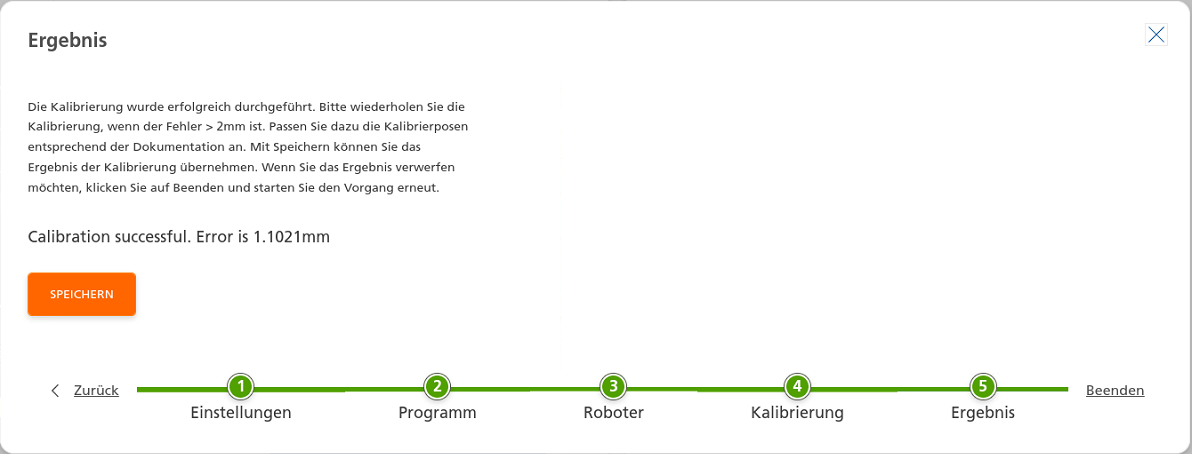
Schließen Sie den Kalibrier-Wizard. Die Kalibrierung wurde erfolgreich durchgeführt.