Kamera kalibrieren
Auge-Hand-Kalibrierung von Kameras in ivOS
Während der Auge-Hand-Kalibrierung wird die Transformation zwischen der Kamera (Auge) und dem Roboter (Hand) ermittelt. Diese Beziehung wird aus mehreren Paaren aus Kamerabild und Roboterpose ermittelt. Im folgenden wird beschrieben wie Sie in ivOS eine Auge-Hand-Kalibrierung durchführen, welche Vorbereitungen notwendig sind und was im Hintergrund passiert.
Vorbereitungen
Kalibrierplatte an Ablageposition hinterlegen.
In diesem Beispiel wird die Platte ZVDA-CB01 des Herstellers Zivid verwendet (https://shop.zivid.com/products/calibration-boards).
Roboterprogram anlegen:
Zur Ablageposition fahren.
Kalibrierplatte ansaugen.
10 bis 20 Posen einteachen. Dabei darauf achten, dass die Kalibrierplatte gut sichtbar im Blickfeld der Kamera ist. Auch der ArUco-Marker in der linken unteren Ecke muss sichtbar sein.
Die Posen und Bilder sollen den ganzen Arbeitsraum und eine Variation möglicher Gelenkwinkel abdecken. Die Neigung des Boards zur Kamera soll aber moderat bleiben.

Roboter in AUTO-Mode versetzten und Teach-Pendant deaktivieren
ivOS starten
Anwendung
Starten der Kalibrierung:
Zum Starten der Kalibrierung im Camera-View [Kalibrierprozess starten] anklicken.
Davor die zu kalibrierende Kamera auswählen!
Im Beispiel ist die Kamera das Modell "zivid2PlusM130" oder "zivid2PlusL110":
Es öffnet sich ein Wizard, der im ersten Schritt die allgemeinen Kalibrier-Einstellungen abfragt.
Diese können unverändert übernommen werden.Durch klick auf Weiter in den nächsten Schritt springen.
Für Fortgeschrittene Benutzer kann das System hier auch für 4DoF-Roboter oder andere Kalibriermethoden konfiguriert werden. Der Screenshot zeigt die empfohlenen Standardeinstellungen.
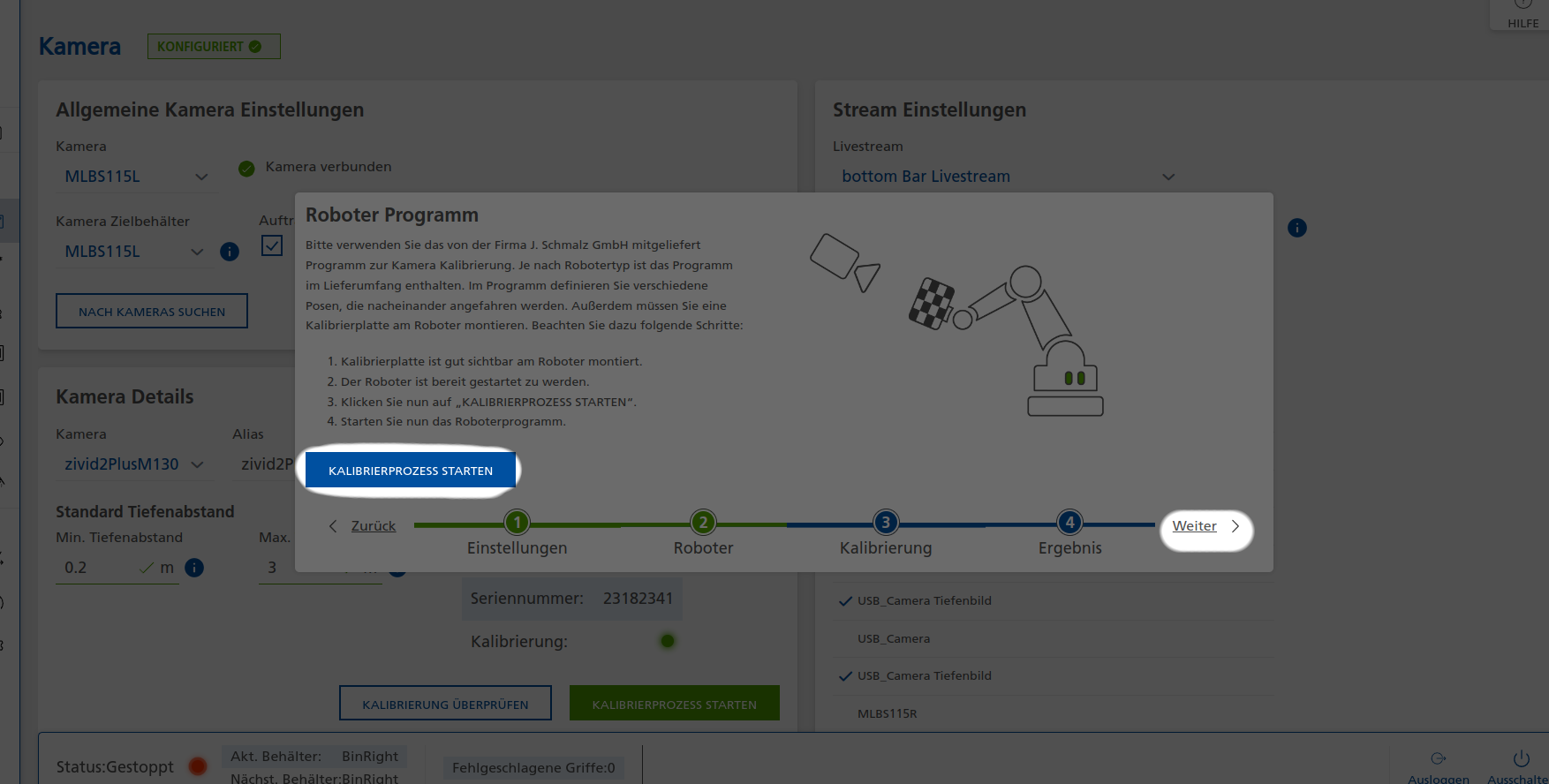
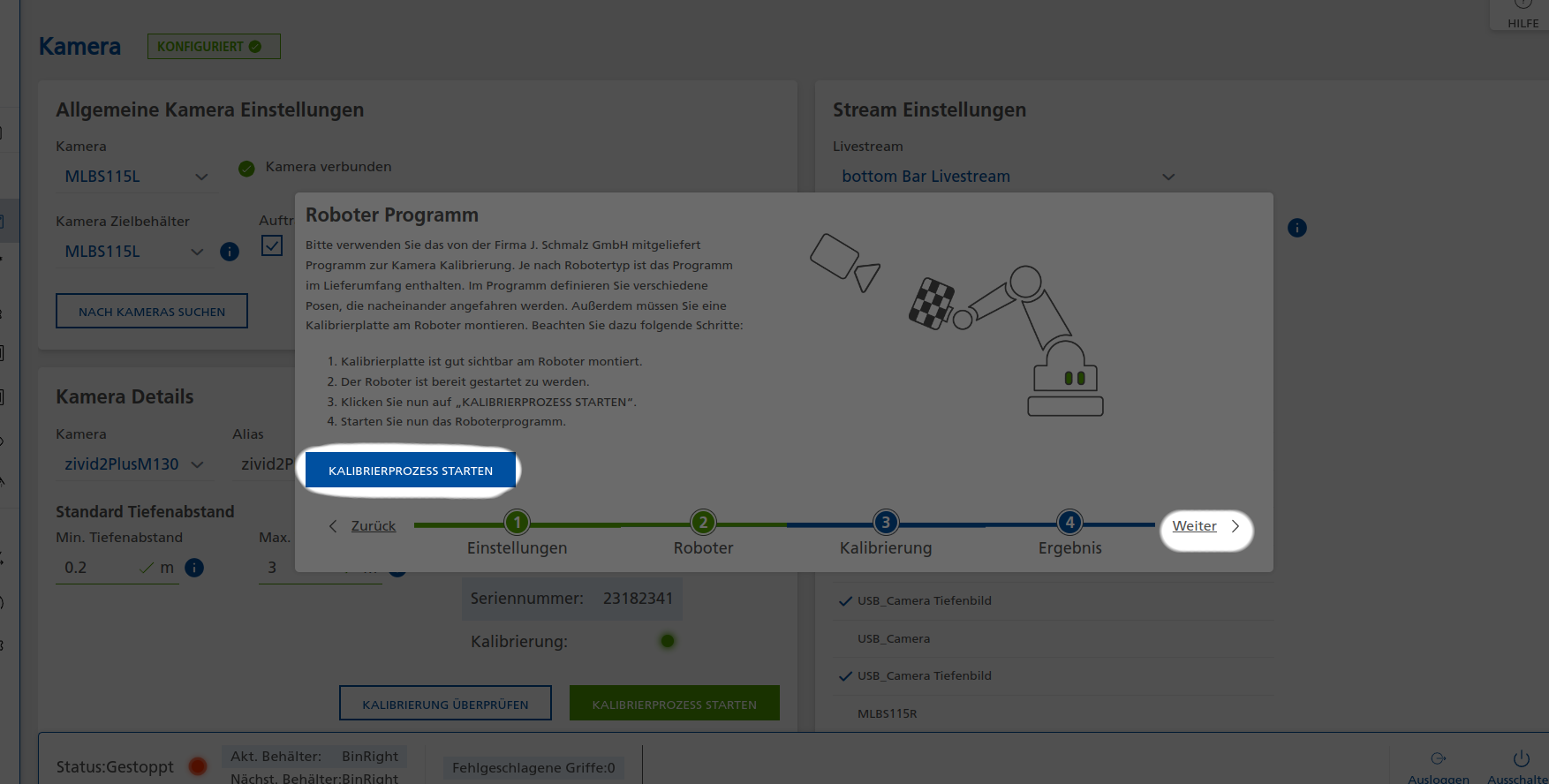
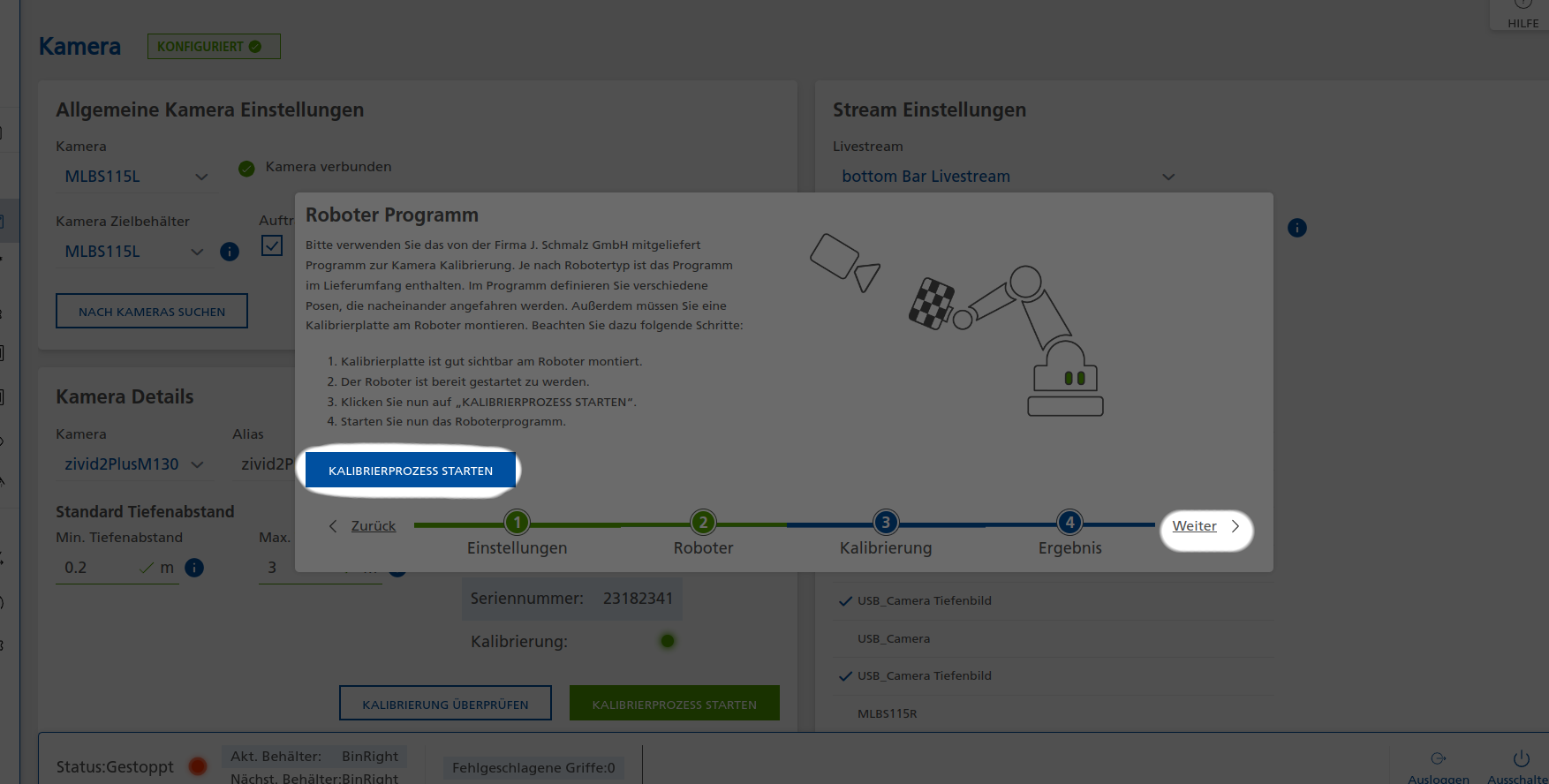
Im zweiten Schritt wird erklärt wie die Platte am Roboter montiert werden soll. Da der Roboter die Kalibrierplatte selbstständig aufnimmt, brauchen sie hier nichts weiter zu tun.
Nochmals auf [Kalibrierprozess starten] klicken, damit der Roboter den Programmmodus von Pick&Place zum Kalibrierprogramm wechselt. Anschließend auf Weiter klicken.
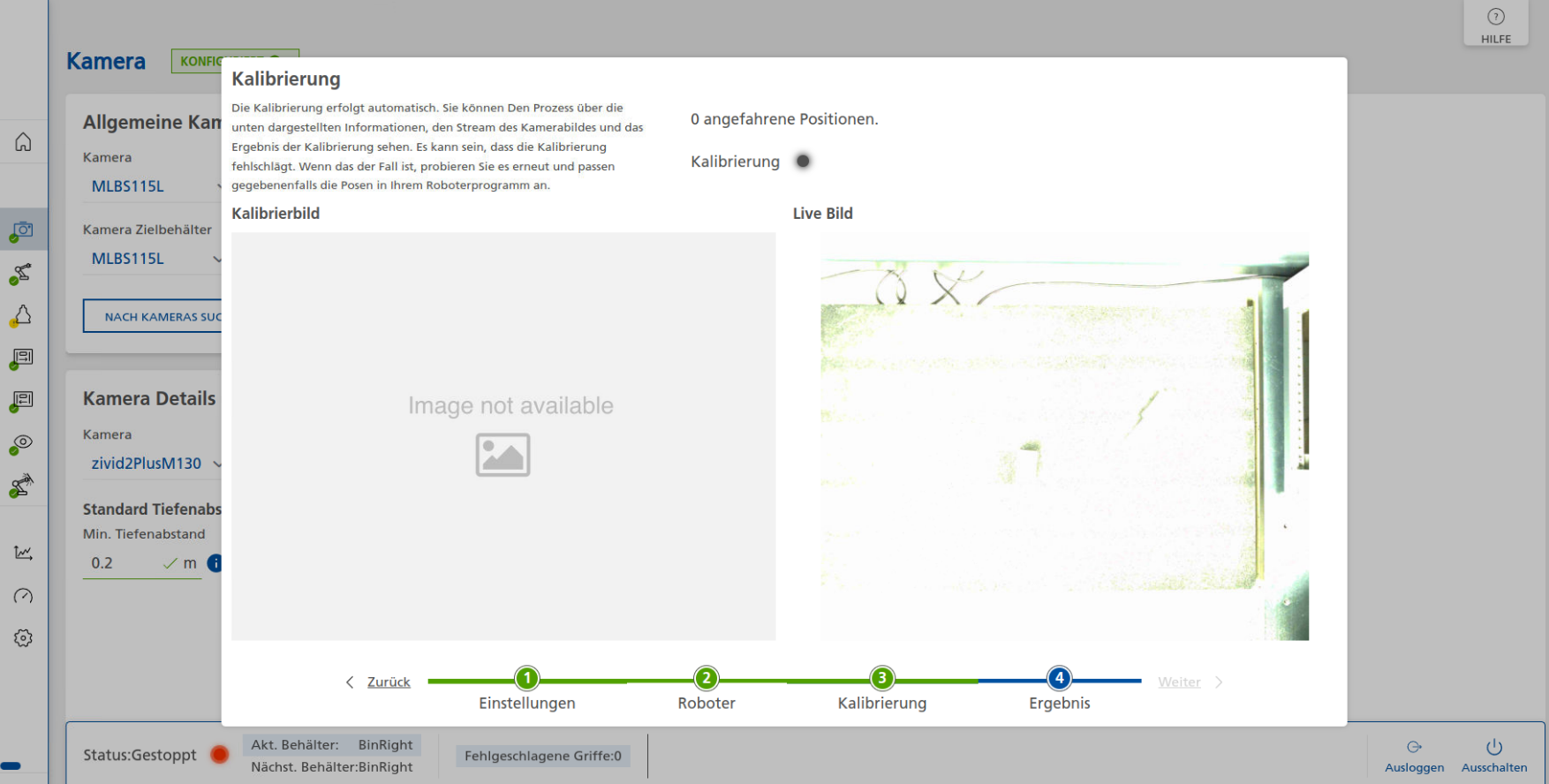
Rechts wird nun ein Live-Bild der Kamera angezeigt. Das Linke Bild ist im aktuellen Modus nicht verfügbar.
Oben wird der Status der Kalibrierung und die Anzahl der angefahrenen Posen angezeigt.
Grünen Hardware-Button unterhalb des Bedienpanels betätigen, um den Roboter zu starten und das Kalibrierprogram abzufahren.
Wenn alle Posen abgefahren sind, wird das Ergebnis der Kalibrierung berechnet und der Kalibrierfehler angezeigt. Der Kalibrierfehler sollte sich in der Größenordnung von 1 mm bewegen.
Wenn die Kalibrierung zufriedenstellen ist, auf [Speichern] klicken und den Wizard schließen.
Die Kalibrierung der Kamera wird daraufhin in der Datenbank hinterlegt und für zukünftige Berechnungen angewandt.